4. Start up the BrachioGraph#
Warning
Before doing anything else, detach the inner arm from the servos - otherwise you risk having the machine flail around wildly when the servos are energised.
4.1. Create a BrachioGraph instance#
Power up the Raspberry Pi. Run:
sudo pigpiod
source env/bin/activate
cd BrachioGraph
python
And then in the Python shell, import the BrachioGraph class from the brachiograph module:
from brachiograph import BrachioGraph
Create a BrachioGraph instance from the class:
bg = BrachioGraph()
This initialises a BrachioGraph instance bg that you can interact with.
You’ll hear the motors buzz as it sets them to their default, parked, position.
4.2. Attach and test the inner arm#
Now reattach the inner arm, so that the machine now looks more or less like this.
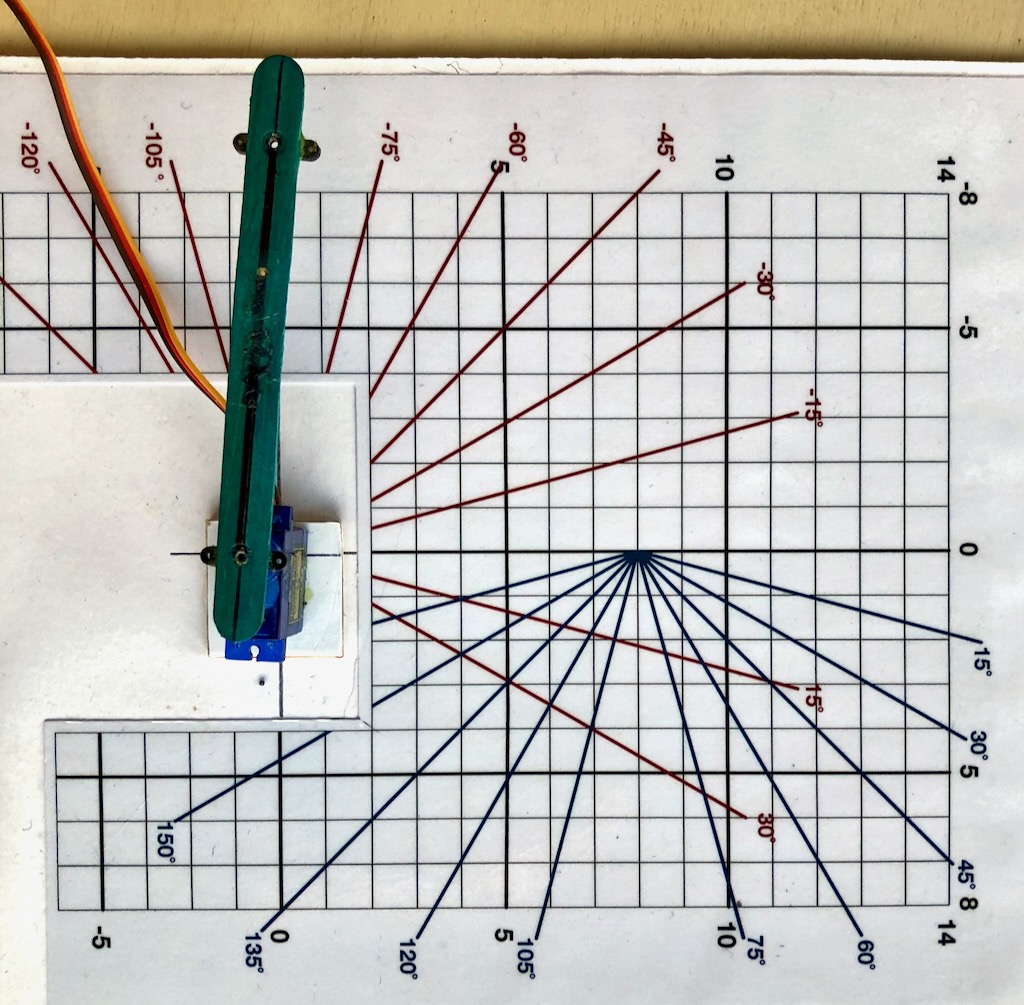
It should be as close to -90˚ (as marked on the grid) as possible, but don’t worry if it’s not, we’ll adjust that later.
Run a quick test:
bg.set_angles(0, 90)
The first value is the angle of the inner arm, the second the angle of the outer arm. The inner arm should swing clockwise to about 0˚. Send it back to its starting point with:
bg.park()
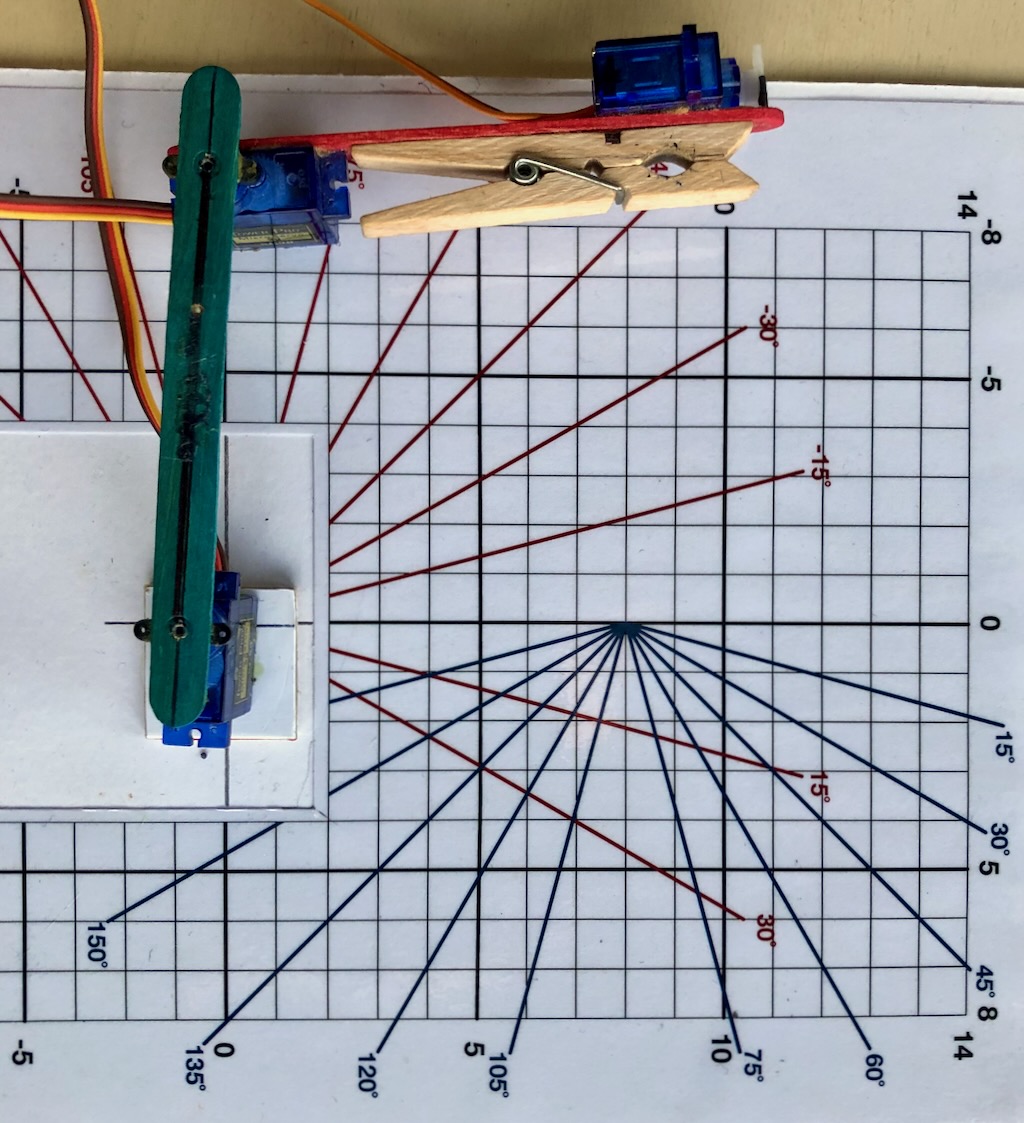
4.3. Attach and test the outer arm#
Now reattach the outer arm. It should be in a position as close as possible to 90˚ relative to the inner arm:
Test it:
bg.set_angles(-90, 120)
The arm should swing clockwise from its 90˚ position by about 30˚. Park the arms again with bg.park().
4.4. Adjust the pen lifting mechanism#
Try lowering and lifting the pen motor:
bg.pen.down()
bg.pen.up()
Adjust the horn on the motor and the position of the pen in the clothes peg so that in the down position the pen firmly touches the paper, and in the up position it clears it by a millimetre or two.
4.5. Do a status check#
Run:
bg.status()
The BrachioGraph will report its status:
------------------------------------------
| Servo 1 | Servo 2
| Shoulder| Elbow
----------------------|---------|---------
pulse-width | 1500 | 1500
angle | -90 | 90
hysteresis correction | 0.0 | 0.0
------------------------------------------
------------------------------------------
pen: up
------------------------------------------
bottom left: (-8, 4) top right: (6, 13)
------------------------------------------